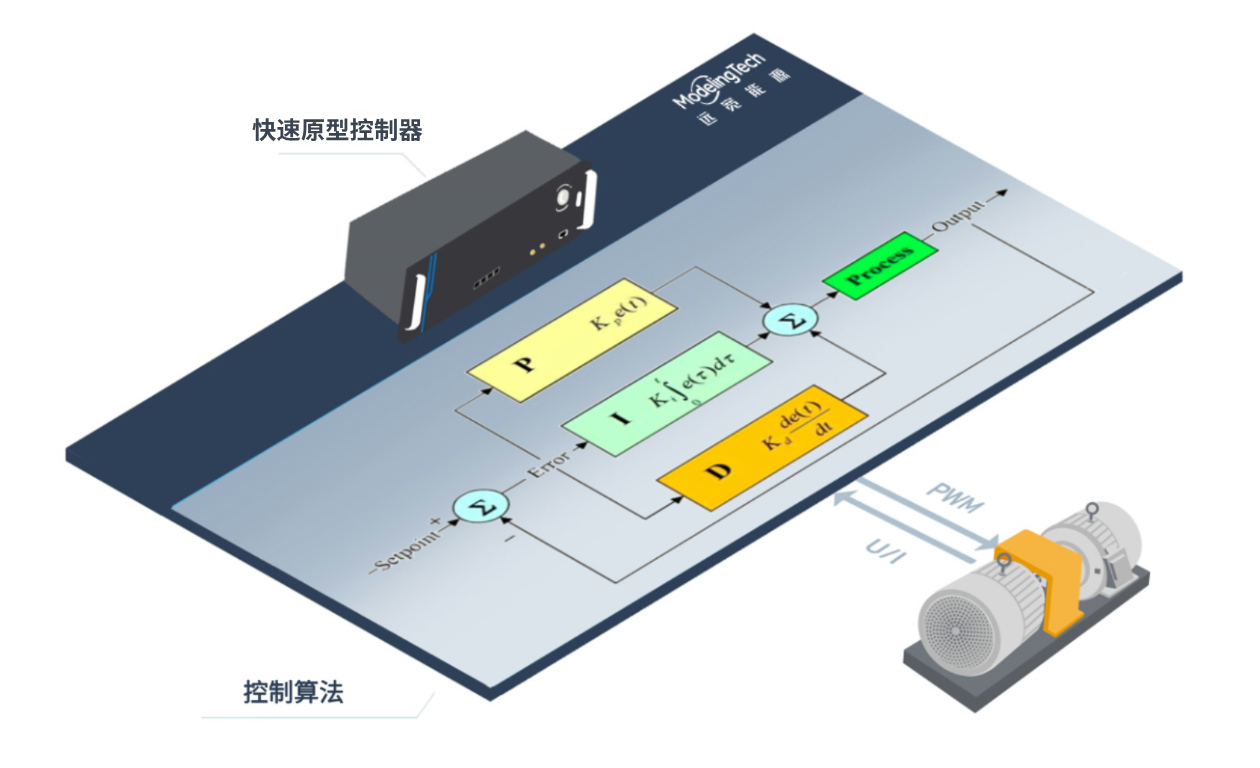
在传统的电驱系统开发中,工程师通常遵循着“设计-仿真-手工编写代码-制作硬件-实测”的串行流程。这种方式下,控制算法只有在真实的控制器硬件(即ECU)完成后才能进行验证,存在开发周期漫长、成本高昂等问题,而RCP可以让控制器在实物控制器硬件诞生之前,先让它的大脑(控制算法)在高性能的实时仿真平台上跑起来,从而快速验证控制算法正确性。
用户可以利用远宽能源提供的StarSimRCP上位机搭建电驱控制器平台界面,可以把Simulink编写的控制算法模型一键编译下载到快速原型控制器中,替代传统的DSP控制器,将控制算法与电驱物理平台结合,进行控制算法调试,协助用户快速实现控制算法开发与测试。

提供大量专业高速AO、AI、DI、DO接口,其中高速PWM DO接口高达128个,AI接口高达64个,能满足多个电驱系统并联系统控制需求。
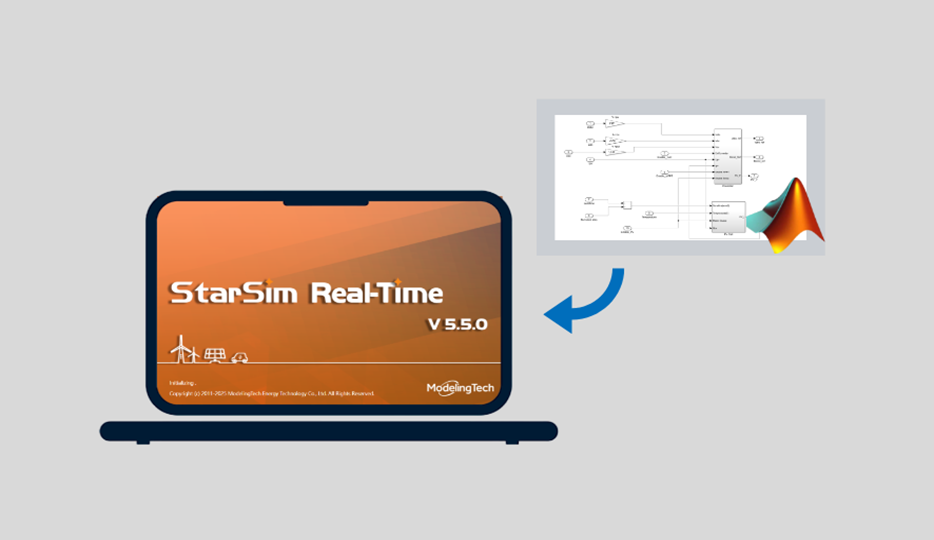
支持通过MATLAB/Simulink进行图形化代码搭建,一键编译控制代码,加速控制策略开发、验证时间。

无需更换硬件平台,只需一个RCP即可取代复杂多变的硬件平台,支持控制参数实时调整,无需修改代码、重新编译。
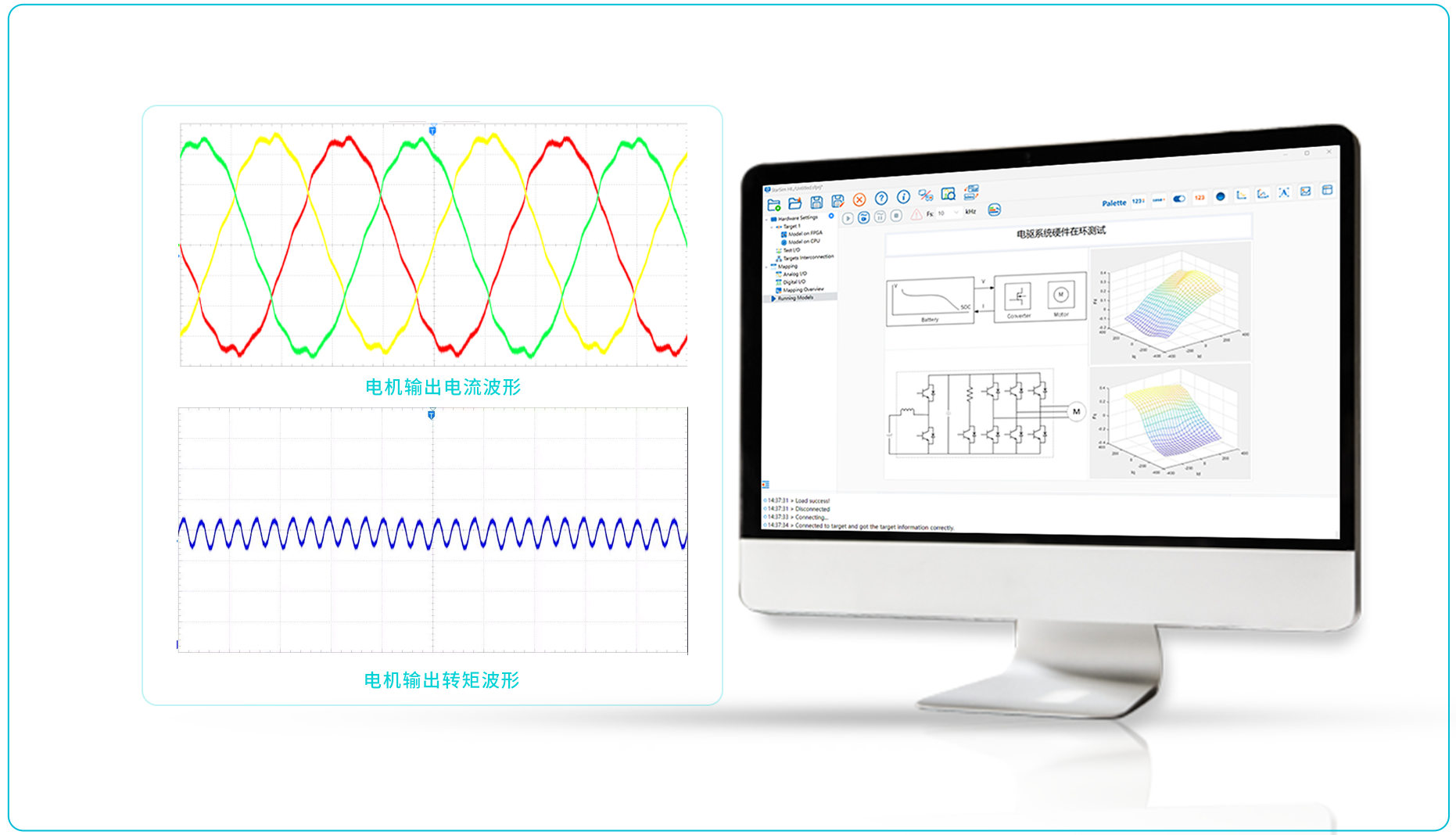
验证控制器对扭矩、转速等指令的响应时间和精度;测试控制器的外特性(扭矩-转速曲线)是否符合设计目标。
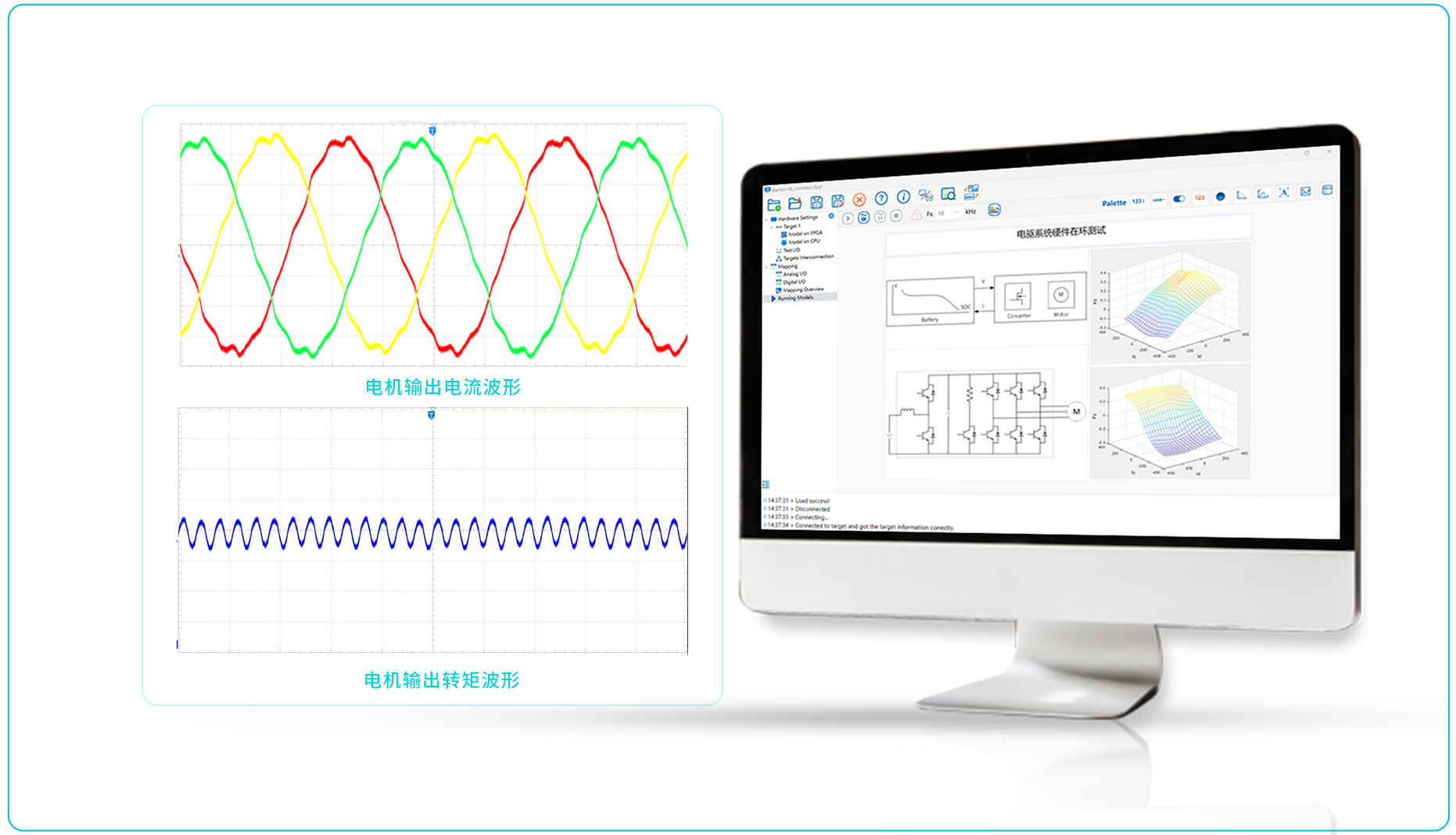
测试电机在不同负载下的转速稳定性、稳态精度和动态响应;测试转矩控制的精度、响应速度以及过载能力;验证在高速区弱磁控制算法的有效性和稳定性。
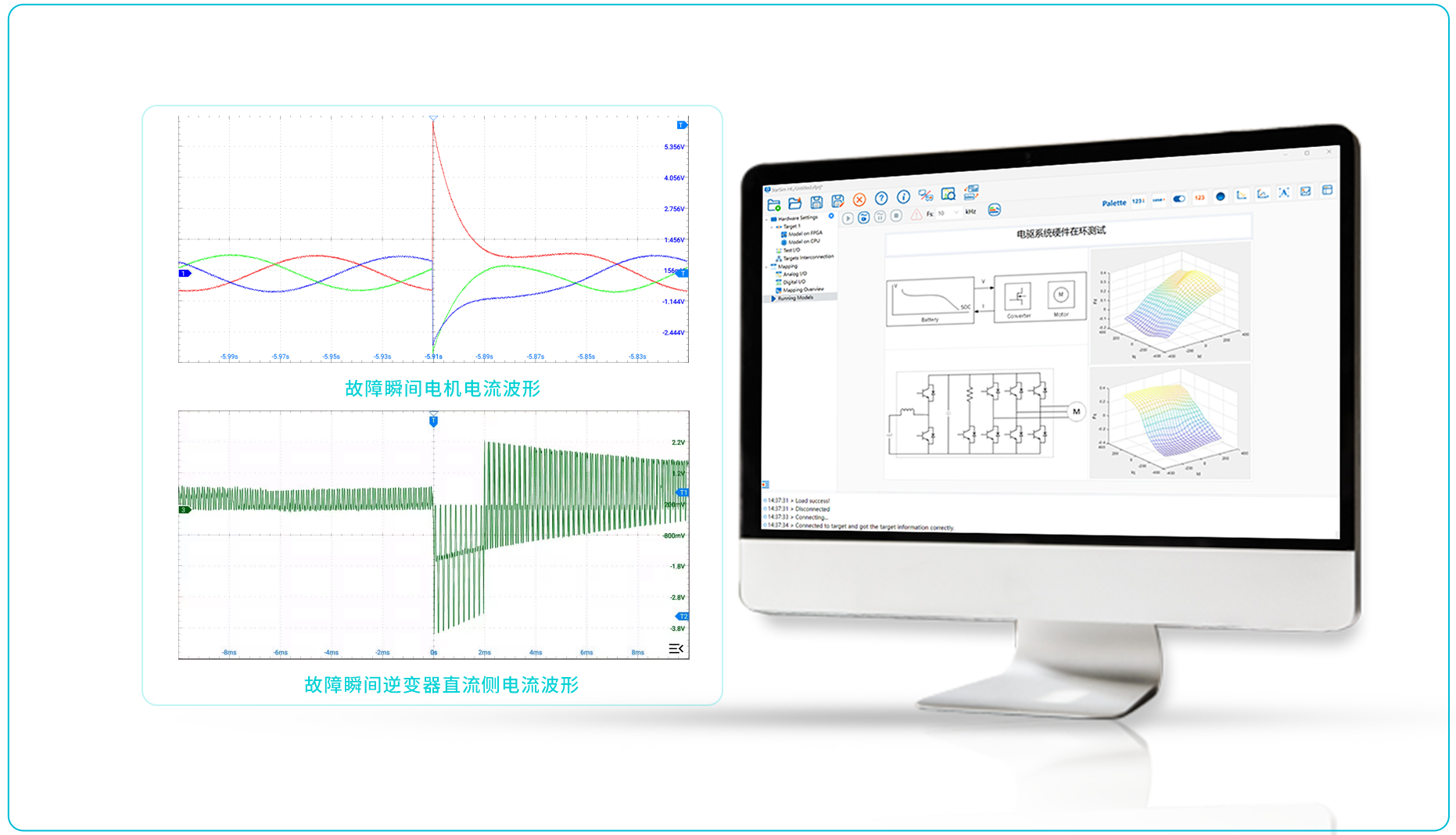
测试通信中断,验证控制器是否响应;测试控制器的一些保护功能是否及时有效。
Copyright ©上海远宽能源科技有限公司 沪ICP备11009377号-1