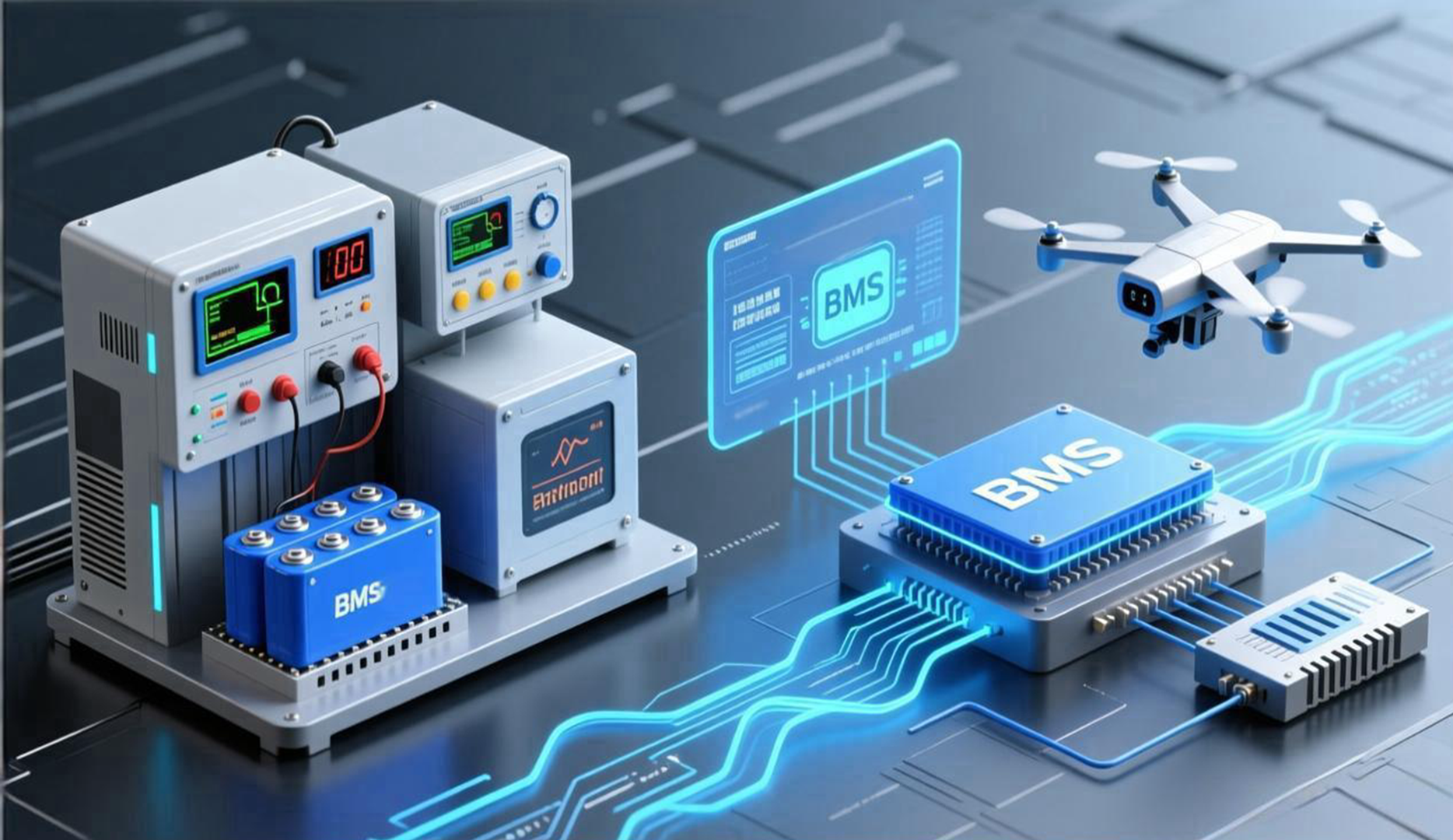
在当前无人机系统复杂度日益提升的背景下,飞控、电驱与电池管理三大核心子系统已形成深度耦合的动态体系。传统单点验证方法难以揭示系统级交互效应,特别是在极限工况下由电能链引发的控制稳定性问题。构建飞控-电驱-BMS三重硬件在环的实时仿真平台,成为破解系统级“木桶效应”和验证全系统功能安全的关键。该技术不仅能精准揭示无人机的真实性能边界与能耗特性,更能驱动跨子系统的协同设计与优化,为打造高性能、高可靠的无人机系统提供了不可或缺的验证基石。
本方案基于远宽能源实时仿真器构建了四旋翼无人机可视化半实物仿真平台。该平台核心组成包括实时仿真器、Flight Gear视景系统、飞控板、电驱控制器、电池模拟器与BMS控制系统。
在半实物仿真中,仿真器通过UDP向Flight Gear发送姿态与位置信息,用于可视化观测;同时通过通信将角速度、加速度等传感器数据发送至飞控板。飞控板解算后输出的电调指令经通信传输至电驱控制器。控制器通过物理IO采集FPGA模拟的电机电流与编码器信号,并输出驱动信号至FPGA中的逆变器模型。电机实际转速由通信反馈回仿真器,形成闭环。电池系统方面,仿真器中的单体电压、温度、总电压及电流通过通信发送至电池模拟器,BMS实时采集相关数据,执行状态估计与故障诊断,从而实现了四旋翼无人机“飞控-电驱-BMS”深度耦合三环测试。

研究在极限功率需求下,电池的实际供电能力;测试BMS控制策略与飞控的控制分配算法实际交互状态。

通过故障注入功能,可以轻松复现BMS故障、电驱故障、飞控指令极端化下无人机运行状况。

采用高保真BMS模型、精确模拟电池的老化、循环次数、温度特性,更加真实模拟无人机续航能力估算。

通过三环测试的数据,可以系统性地整定三个子系统的参数,实现全局最优,而非各个子系统各自为政。

姿态控制是四旋翼稳定飞行的关键,设置四旋翼期望的滚转角为-5°、俯仰角为5°、偏航角度为-10°,四旋阶跃响应如图所示,在飞控作用下,四旋翼姿态角的角度响应能快速达到期望值,且几乎没有稳态误差。由BLDC1、4转速及电流结果可知,在30s无人机做仰运动时为例,BLDC 1转速上升、电流增大, BLDC 4转速下降、电流减小,符合变化关系,且整个过程电机转速可快速稳定跟随给定值。

给定x、y轴为正弦波形,z轴为斜坡信号,形成三维的环形轨迹;由结果可知,无人机在飞控算法下可稳定跟随给定轨迹、且BLDC转速稳定在给定值;电池端电压、SOC随着飞行时间推移在逐渐下降,电流输出值稳定在11A左右。
Copyright ©上海远宽能源科技有限公司 沪ICP备11009377号-1