随着牵引电机控制技术以及制造技术的快速发展,电机已广泛应用于城市轨道交通、轻电车轨、地铁等领域,尤其随着轨道交通电气化的快速推进,牵引驱动系统仿真引起了越来越多研发人员的关注,而传统的牵引电机实物测试存在成本昂贵、危险系数高、测试周期长等问题。因此,许多研发人员开始已逐渐利用实时仿真器对牵引电机控制器进行硬件在环测试(Hardware in the loop, HIL),相比较于传统的牵引电机实物测试,采用实时仿真技术不仅可以快速、高效、安全、经济地对牵引电机控制器测试,而且还可以对不同类型不同参数的牵引电机进行快速切换测试。
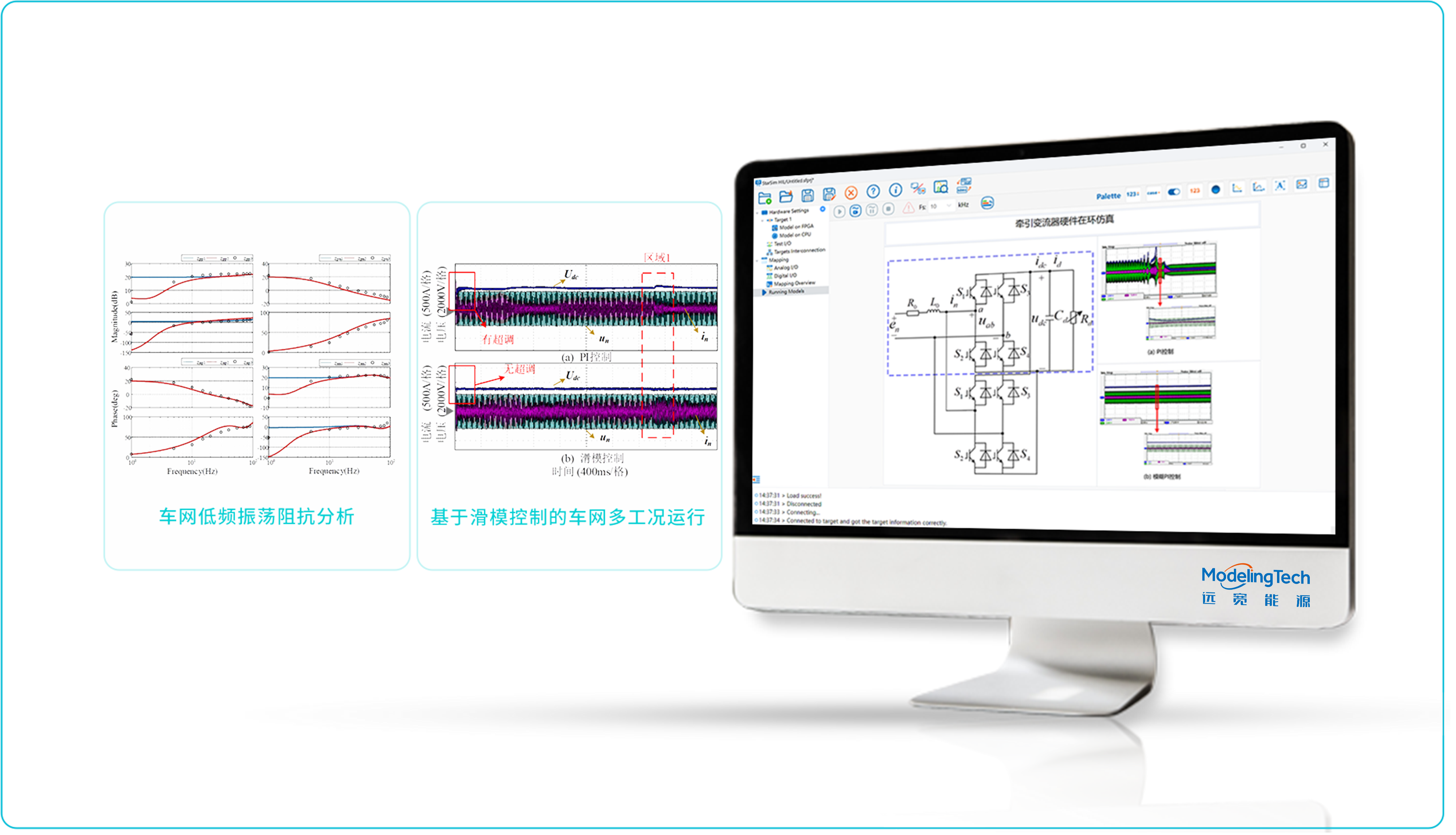
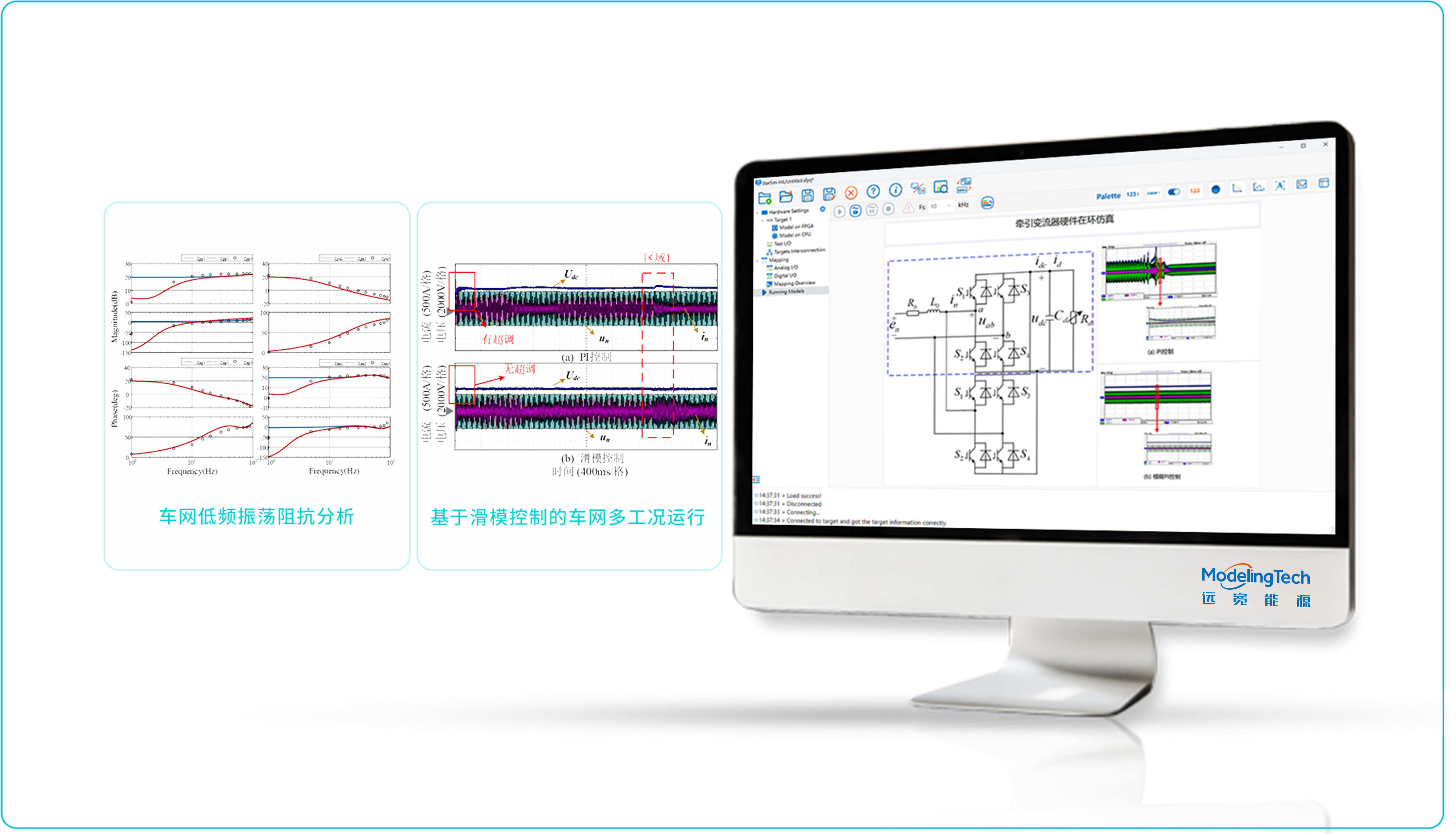
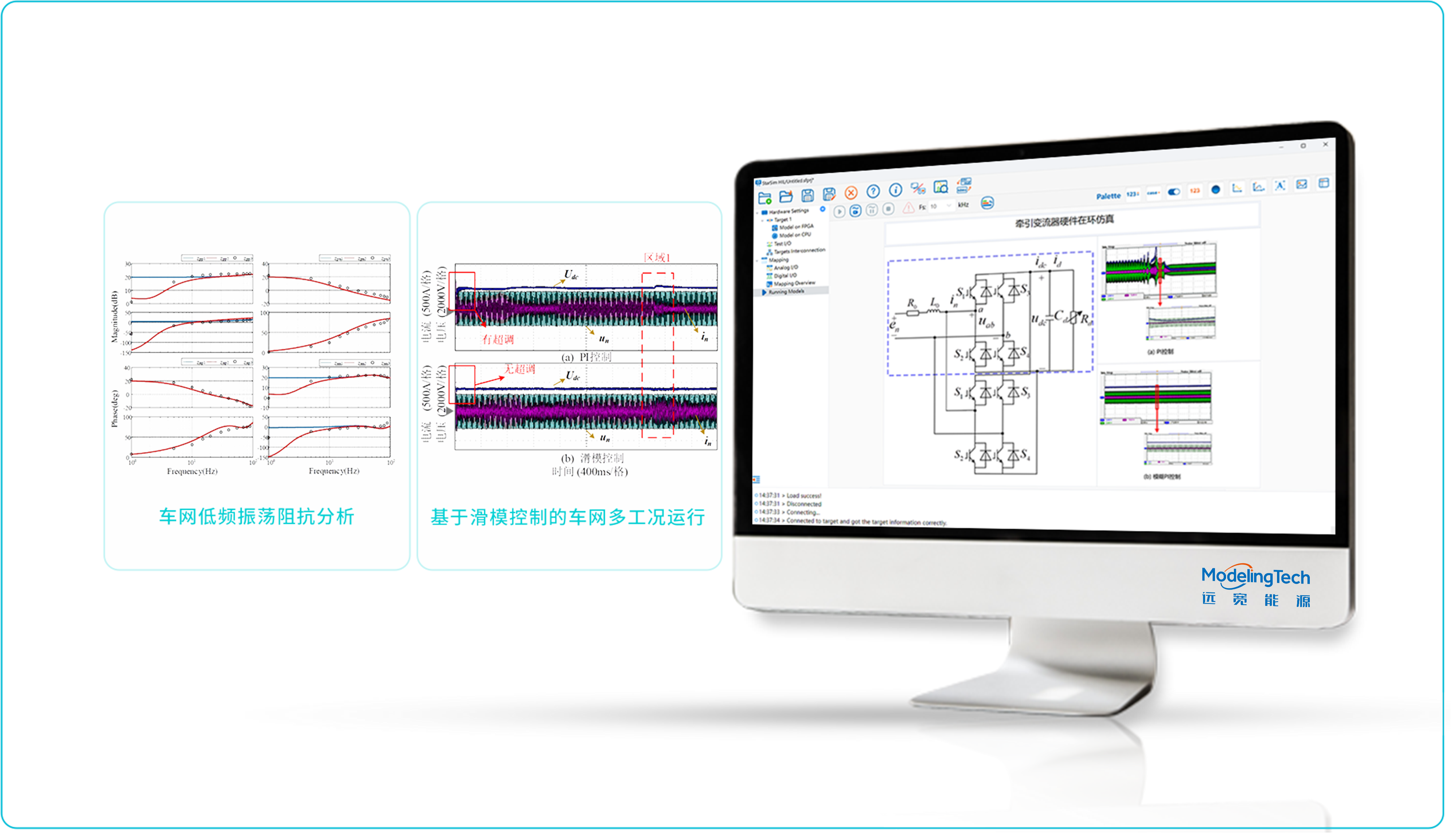
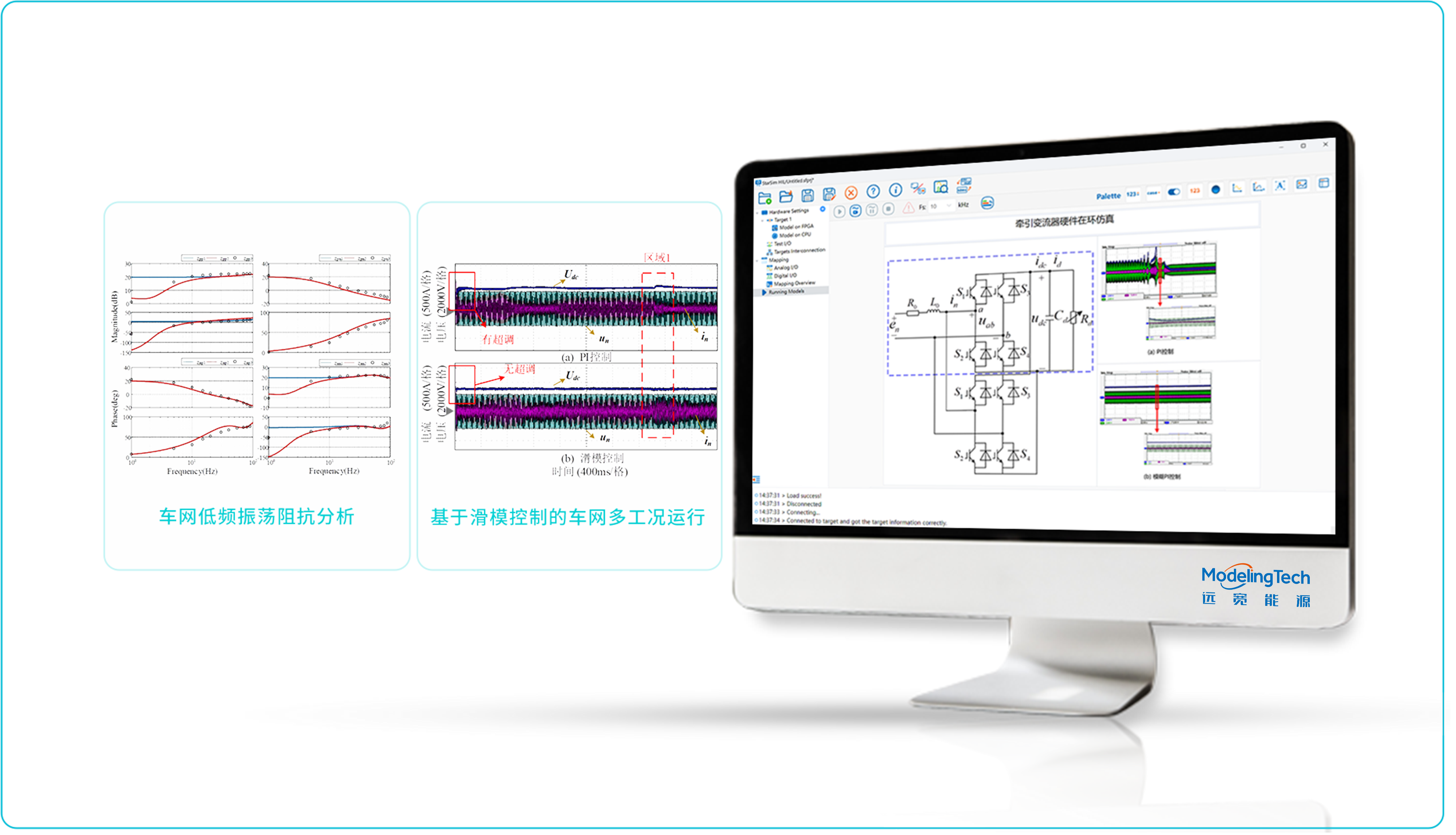
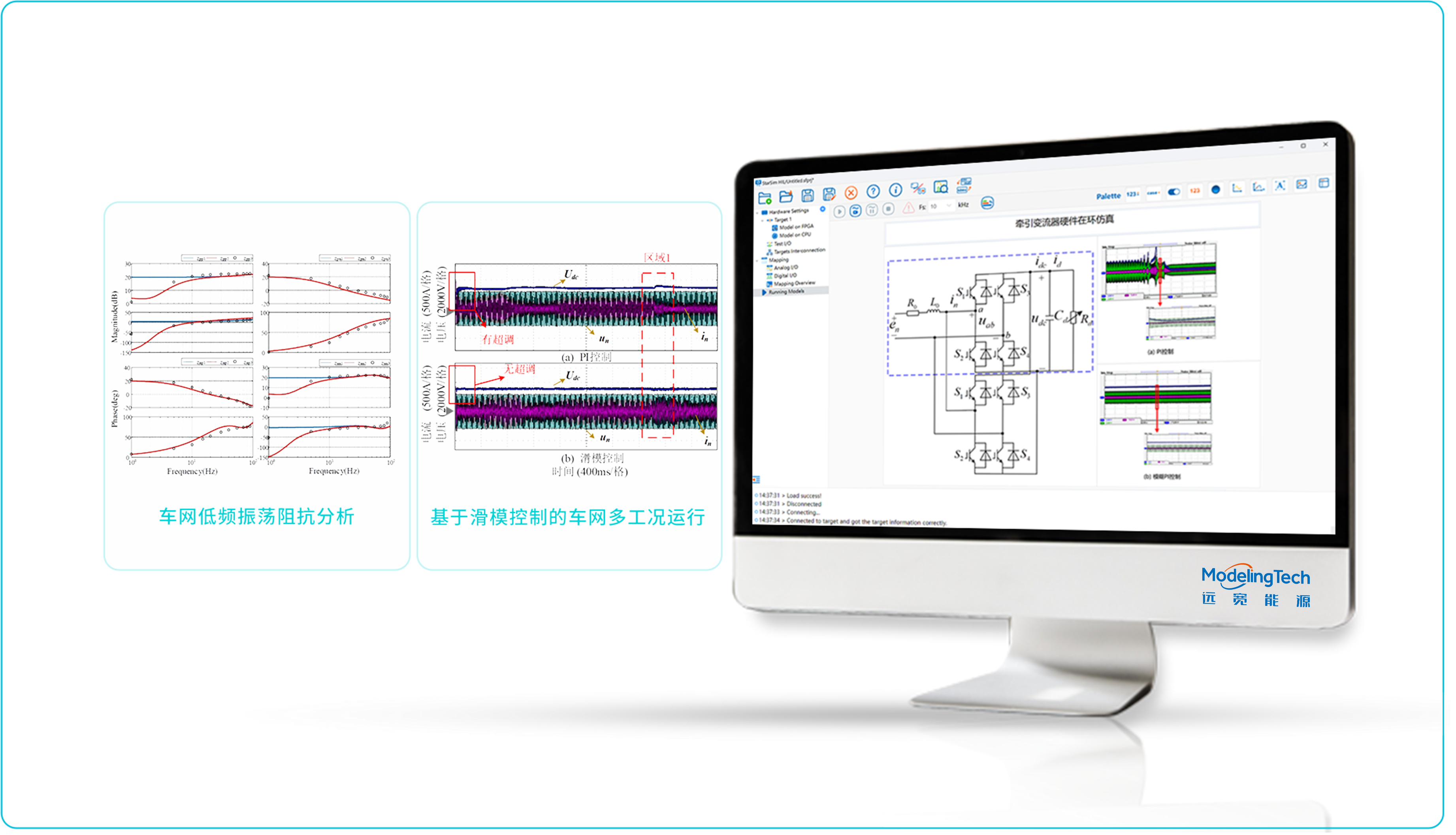
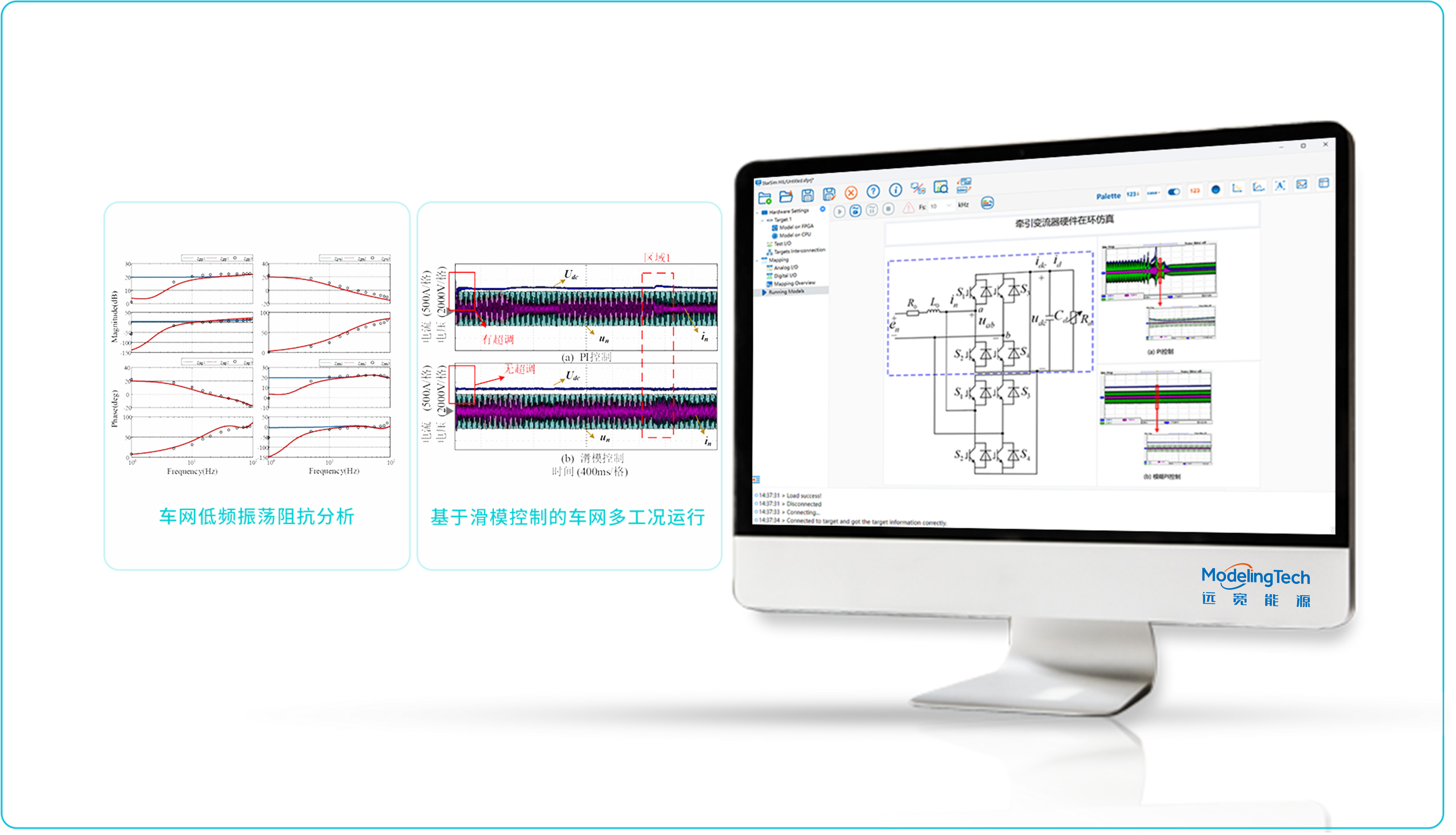
西南交通大学刘志刚教授的科研团队提出了一种基于滑模控制的车网多工况运行性能改善方法,该方法与传统PI控制相比具有更好的控制性能,如多种工况下牵引线侧电流的总谐波畸变小、制动时电压波动小、抗干扰能力强,并能有效抑制运行过程中LFO 的发生;研究利用上海远宽的StarSim电力电子小步长实时仿真器进行实验,通过实验结果验证了所提出的动车组牵引网侧变流器控制策略的正确性,并把成果总结发表于《IEEE ACCESS》: Y. Zhang, S. Wu, Z. Liu, Q. Yan and T. Chen, "An Approach to Improve System Performance in the Vehicle-Grid System Using Sliding Mode Control Under Multiple Operation Conditions," in IEEE Access, vol. 8, pp. 11084-11095, 2020.





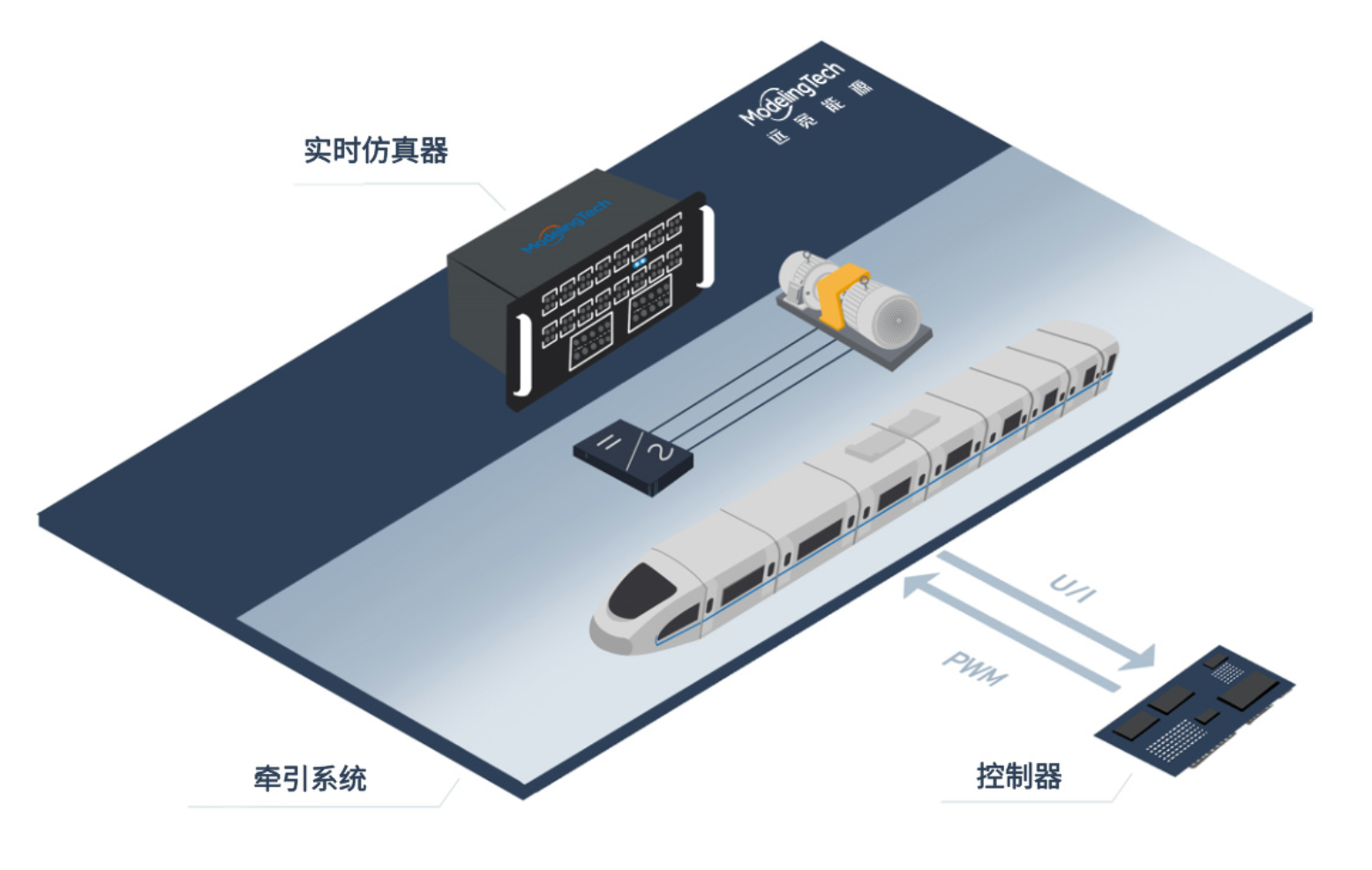
牵引电机仿真测试不仅含有高速动作的开关器件,还需要电机的编码器信号精确输出,这对实时仿真具有一定挑战。远宽能源提供的StarSim实时仿真器,基于电力电子器件的细节模型,同时利用最新的FPGA技术,可以实现1微秒步长、任意拓扑、多类型电机、任意工况的电力电子系统实时仿真,被广泛应用于新型拓扑结构、新型控制策略验证、电机驱动等的实时仿真中。用户只需利用StarSim HIL上位机软件将电机仿真拓扑载入至实时仿真器中,同时将实时仿真器的接口与电机控制器接口正确连接,即可实现电机控制器测试。
电机模型以us级步长运行在FPGA上,可精确模拟电机运行特性。
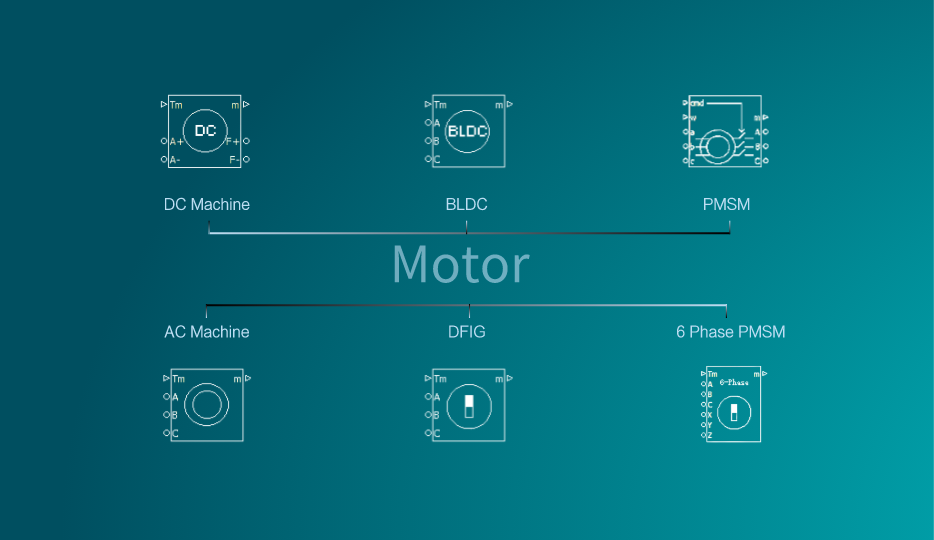
主要包括直流电机、直流无刷电机、三相永磁同步电机、交流感应电机、六相永磁同步电机等电机模型;另外,可以根据用户需求定制电机模型。
可以同时支持2个三相永磁同步电机或2个三相鼠笼式感应电机。

支持电机位置传感器模型包括编码器,霍尔传感器,旋转变压器。
Copyright ©上海远宽能源科技有限公司 沪ICP备11009377号-1