With the large-scale construction of high-speed railway, the popularization of rail transit in the city, the mass construction of electric vehicle charging stations, these power consumption equipment have decentralized, high-power and power flow rapidly and greatly changing features , the stability of the
power supply network is facing severe challenges.At the same time ,electric vehicles comprehensive popularization also poses new challenges for the corresponding research and development enterprises .In order to deal with the above problems,universities and research institutions have invested a lot of money in the simulation and test experiments of electrified traffic. The common experimental methods include scaled physical model, computer virtual model offline simulation, and HIL model real-time simulation. Their respective characteristics are as follows:
1) scaled physical model experiments: since the scale of electrified traffic is generally at the city level, the investment for physical experiments is huge, and the construction cycle is very long, which also has higher requirements for the laboratory site. It may also occur that the built laboratory is not suitable for new projects and needs to be expanded, and with low flexibility;
2)offline simulation experiment of virtual model using computer: there are problems such as long single simulation time and high time cost of changing working conditions. In addition, due to some requirements of electrified traffic for communication, offline simulation using computer cannot accomplish all simulation goals;
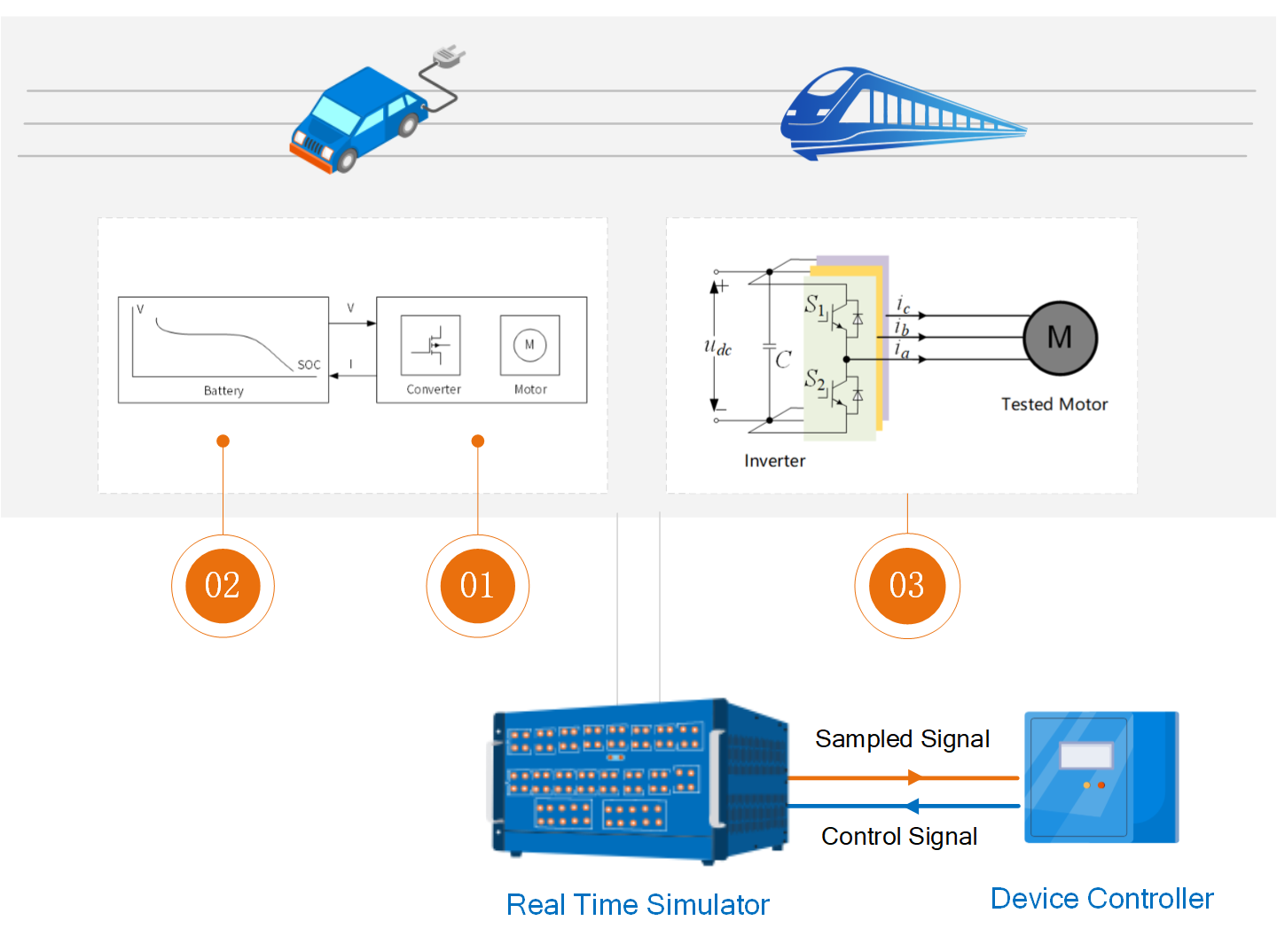
3) real time simulation experiment with HIL model: it can not only flexibly solve the simulation problem of large-scale power grid changing working conditions in real time, but also simulate the communication equipment.Thus it can be seen,HIL simulation is a better selection for solve simulation of electrified traffic.


 Technology
Technology

 User Cases
User Cases